|
|
Навигация:
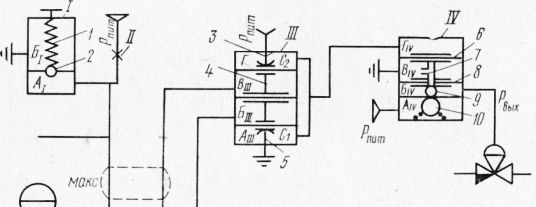
Пневматические регуляторы широко применяют в промышленности вследствие их большой надежности и простоты в эксплуатации, а также пожаро- и взрывобезопасности. Рабочей средой для них является сжатый воздух. Следует учитывать, что многие узлы пневматических регуляторов имеют малые проходные сечения и степень очистки воздуха, поданного в приборы, что определяет надежность их работы. Пневматические регуляторы используют для регулирования давления, температуры, уровня, расхода и т. п. С помощью того или иного измерителя прибором можно регулировать различные величины, т. е. осуществлять комплексную автоматизацию производственного процесса. Современные пневматические приборы строят по элементному принципу — их монтируют из отдельных типовых элементов. По аналогии с электронной аппаратурой разработан целый ряд пнев-мореле, пневмоусилителей, пневмосопротивлений емкостей и других элементов. Каждый элемент выполняет простейшие функции. Эти элементы, имеющие простое устройство, легко отлаживаются и имеют сравнительно малые габариты. Монтаж элементов в законченные схемы ведут на специальных платах, внутри которых проходят каналы, необходимые для соединения элементов в схему. Как и для электроники, эти платы выполняют печатным способом, что упрощает сборку и монтаж приборов. Каждый из элементов рассчитан на один диапазон изменения пневматических сигналов 0,2—1,0 кг/см3. Позиционный регулятор типа ПР-1.5. Этот регулятор, называемый также пневматическим реле, предназначен для получения дискретных (при давлении от 0,2 до 1 кг/см2) пневматических сигналов в результате понижения или повышения поступающего на вход регулятора давления от преобразователя. Поступающее давление, пропорциональное величине регулируемого или измеряемого параметра, сравнивается с заданной величиной, и в случае их несоответствия регулятор подает дискретный сигнал. Регулятор используют для непосредственного управления исполнительным механизмом. Он может также приводить в действие какое-либо сигнальное устройство. Регулятор можно настроить на получение пневматического сигнала при превышении измеряемым или регулируемым параметром заданного значения (сигнал максимум) или на сигнал на минимум при падении параметра ниже заданного уровня. Работа регулятора ПР-1.5 и модулей, из которых он собран, рассмотрена ниже. Прибор состоит из элемента сравнения III, усилителя мощности IV, задатчика I, постоянного дросселя II. Регулятор можно настраивать на максимум или минимум переключением входных каналов, показанных пунктиром. В первом случае получают сигнал на выходе из усилителя при повышении регулируемым параметром заданного значения, а во втором — при значении параметра ниже заданного.
Рис. 1. Схема пневматического позиционного регулятора ПР-1.5 Элемент сравнения III состоит из трех мембран (двух крайних большего размера и средней меньшего размера), скрепленных общим штоком. Перемещение штока при изменении давления в камерах между мембранами ограничено двумя упорами, которые одновременно используются как сопла. Концы штока служат заслонками. К соплу подводится воздух питания (рПит= 1,4 кг/см2), а сопло сообщает кзмвру Лщ с атмосферой. Допустим, входной сигнал от преобразователя поступает в камеру Вш элемента сравнения, а сигнал задания — в камеру Бш. Тогда, пока давление от датчика больше заданного давления, сопло будет закрыто, а сопло 3 открыто, так как на блок мембран действует неуравновешенное усилие, прогибающее их вниз. Предположим, что давление р2 воздуха на выходе элемента сравнения равно 1 кг/см2. Если входной сигнал станет меньше заданного, то мембраны прогнутся вверх, прикрыв сопло и открыв сопло. При этом давление на выходе из элемента упадет до нуля вследствие выпуска воздуха через сопло с линии выхода в атмосферу. Если р2 увеличивается, мембраны прогнутся вниз и шток, нажимая на шарик, закроет отверстие в штоке и откроет отверстие, прикрываемое шариком. Давление в камере £iv и на выходе усилителя увеличивается до значения Задатчик I представляет собой устройство, обеспечивающее изменение давления на его выходе в диапазоне 0,2—1 кг/см2. Воздух питания подводится через дроссель II в камеру А1 под шарик, управляющий сбросом воздуха из камеры А1 в камеру Б1 и в атмосферу в зависимости от его положения, которое определяется величиной усилия задающей пружины 1. При перемещении шарика вниз давление на выходе задатчика увеличится, а при перемещении вверх снизится. С помощью задатчика можно настроить выходное давление регулятора на любую величину в пределах 0,2—1 кг/см2 в зависимости от работы систем регулирования. Статический регулятор ПР-2.5 предназначен для получения непрерывного регулирующего воздействия на-исполнительный механизм с целью поддержания величины регулируемого параметра на заданном уровне. Регулятор может работать с дистанционным заданием, получаемым от ручного задатчика вторичного прибора или от любого другого устройства со стандартным пневматическим сигналом.
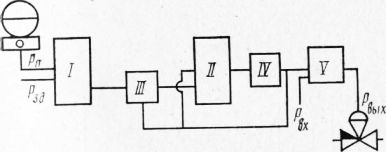
Рис. 2. Схема пневматического статического регулятора ПР-2.5 Прибор ПР-2.5 состоит из двух элементов сравнения I и II, сумматора III, усилителя мощности IV и выключающего реле V. Последнее предназначено для отключения регулятора при переходе на ручное управление. Этот регулятор работает вместе со вторичным прибором ПВ-10Э, или ПВ-10.1П. На задней стенке этого прибора имеется специальное гнездо, куда крепят регулятор. В самом приборе помимо измерительной части, рассмотренной выше, имеется кнопочная станция управления регулятором. В приборе имеются кнопки «Вкл» и «Выкл», предназначенные Для включения регулятора. Кнопкой А включают автоматическое управление технологическим процессом с помощью регулятора, установленного на задней стенке вторичного прибора. Задание регулятору устанавливают с помощью задатчика, находящегося в приборе ПВ. Нажатием кнопки с индексом Р отключается автоматический регулятор и управление процессом переводится на ручное. В этом случае исполнительный механизм, минуя регулятор, подключается непосредственно к задатчику вторичного прибора. Ручка управления задатчика выведена на передней панели прибора. Кнопка АП подключает к регулятору программный задатчик — специальный прибор. В этом случае задание будет являться величиной переменной, поступающей на регулятор от специального прибора — программного задатчика.
Рис. 3. Вторичный пневматический прибор ПВ-10: Ниже рассмотрена работа переключателя на примере ручного управления. Когда нажаты кнопка с индексом Р и кнопка регулятора «Выкл», камеры элементов II и III сообщаются с атмосферой; сопла реле этих элементов открыты. Воздух под давлением, пропорциональным величине задания, от ручного задатчика 3d поступает на выход и в привод шкалы «Клапан» исполнительного механизма. Кроме того, воздух проходит в привод шкалы «Задание» и в регулятор IV. От датчика воздух под давлением, пропорциональным измеряемой величине, подводится к штуцеру, подается на привод шкалы прибора «Переменная» и на штуцер регулятора IV.
Рис. 3. Схемы пневматических изодромных регуляторов: Во всех промежуточных положениях и при ручном управлении регулятор должен быть выключен кнопкой «Выкл». Изодромный регулятор ПР-3.21 предназначен для получения непрерывного регулирующего воздействия в виде давления сжатого воздуха, посылаемого к исполнительному механизму с целью поддержания измеряемого параметра (расход, давление, температуры и др.) на заданном уровне. По характеру воздействия регулятор является изодромным с зоной регулирования, настраивающейся в пределах от 6 до 3000%, и временем изодрома в пределах от 3 до 100 мин. Регулятор можно использовать для работы с датчиками, вторичными приборами, задатчиками или другими устройствами со стандартными пневматическими сигналами на выходе. Регулятор ПР-3.21, так же как и предыдущий, собран из отдельных элементов на плате из органического стекла. Принцип действия регулятора основан на компенсации сил при условии, что механические перемещения чувствительных элементов близки к нулю. Вследствие этого регулятор обладает высокой чувствительностью. Сигналы Рзад и Ввх, поступающие от задатчика и датчика в виде давления сжатого воздуха, действуют на мембраны элементов сравнения I и III. Силы давления на мембраны устройства сравнения уравновешиваются силами давления воздуха на мембраны отрицательной и положительной обратных связей. Пропорциональную составляющую регулятора вводят путем воздействия на отрицательную обратную связь, интегральную составляющую на положительную обратную связь. Величины этих составляющих меняют регулируемыми дросселями диапазонов дросселирования ДД и времени изодрома ПДу. Суммарное воздействие на выходное давление пропорциональной и интегральной составляющих воспринимается элементом сравнения V. Регулятор ПР-3.21 состоит из пропорционального звена (элементы III и IV) и интегрального (элементы I к II). Связь между звеньями происходит путем подачи воздуха с выхода элемента в камеры Дщ и Ду. Давление от датчика Рвх подводится одновременно к камерам Дх и Атт. а давление Рзад — к камерам Б\ и Sin- Выходное давление пропорционального звена изменяется пропорционально величине рассогласования между измеряемым параметром Рвх и заданной величиной Рзад. Интегральное звено (/ и II) вырабатывает интеграл величины рассогласования между измеряемым и заданным давлением. Коэффициент пропорциональности К настраивают изменением проводимости а, регулируемого дросселя ДД сумматора IV. При закрытом дросселе этот коэффициент имеет минимальное значение. Если же дроссель открыт, коэффициент К принимает максимальное значение. Время изодрома настраивают дросселем II. Когда этот дроссель закрыт, время изодрома достигает максимального значения. Выходное давление регулятора поступает на вход усилителя мощности VI в камеру Г, затем через сопло большого диаметра Си которое выключает реле VII, на выход прибора. Выключающее реле VII предназначено для отключения прибора при переходе на ручное управление путем подачи давления Рвх в камеры Ащ. Таким образом, в камерах положительной обратной связи при ручном управлении процессом сохраняется такое же давление, как и на исполнительном механизме, что обеспечивает плавный переход его на ручное управление. Для гашения автоколебаний, возникающих в системе, вводят две обратные связи — положительную в камеру By и отрицательную в камеру Гу. Автоколебания, возникающие в случае нарушения равновесия системы, затормаживаются при помощи нерегулируемого дросселя ЯД, включенного в линию положительной обратной связи (камера By). Изодромные регуляторы ПР-3.6 и ПР-3.5. Эти приборы предназначены для работы вместе с пневматическими преобразователями. Регулятор имеет вид блока, который в свою очередь состоит из набора отдельных шайб, стянутых шпильками. Шайбы отделены друг от друга гибкими мембранами, образующими внутренние камеры блока. Эти регуляторы работают вместе со вторичными приборами типа 2МП или 3PJ1. Ниже рассмотрено действие модификации этих регуляторов. Модификация ПР-3.5 представляет собой регулятор со встроенным в него задатчиком; модификация ПР-3.6 получает задание от блока дистанционного задатчика. Вместе с регулятором ПР-3.6 можно применять программные задатчики с автоматической программой по времени или по независимому параметру. Регулирующий блок состоит из усилительного реле (камеры А, Б, В и Г), элемента сравнения и обратной связи (камеры Д, Е, Ж и К), изодромного устройства (камеры JI, М и Я), а для блока ПР-3.5 — из задатчика (камеры О и Я). Блок работает следующим образом. Сжатый воздух давлением 1,4 кг/см2 после редуктора подводится в камеру А. Если между стержнем и шариком имеется зазор, воздух через канал стержня поступает в камеру В, соединенную с атмосферой. Когда же стержень упрется в шарик и отожмет его вниз, сжатый воздух поступит в камеру Б и далее через каналы О и Я в регулирующий клапан. В камеру Е поступает сжатый воздух из измерительного блока (датчика), а в камеру Ж — из задающего устройства. При неравенстве давлений в камерах Е и Ж стержень меняет свое положение относительно сопла. Предположим, что измеряемая величина стала меньше заданной. Тогда стержень прикроет сопло и в камере начнет расти Давление. Так как камеры Г и Д отделены жесткой перегородкой, давление прогнет мембрану и переместит полый стержень, который отожмет шарик. При этом уменьшится вход воздуха в атмосферу через канал стержня 1 ив камеру В и увеличится приток воздуха в камеру Б, а оттуда через клапан 6 в камеры обратной связи Д и К. Разность давлений в камерах Д и К определяет обратное перемещение стержня к соплу, т. е. обратную связь. Камеры Б и Д сообщаются, и давление в них равно. В камеру К воздух непрерывно поступает из камеры Б через регулируемый дроссель и выходит из камеры через постоянный дроссель и сопло, сообщающееся с атмосферой. Сечение дросселей подобрано с таким расчетом, что, когда дроссель открыт полностью, давление в камере К почти равно давлению в камере Д. Эффект обратной связи незначителен, и блок работает с наименьшим пределом пропорциональности. Когда закрывается дроссель, разность давлений в камерах Д и К возрастает и увеличивается эффект обратной связи. Пределы пропорциональности можно настраивать дросселем от 10 до 250%. Изодромное устройство работает следующим образом. Если нет равенства давлений воздуха, поступающего от измерительного блока, воздух из линии обратной связи через регулируемый дроссель поступает в глухую камеру М и прижимает мембрану к соплу. Это приводит к повышению давления в камерах JI и К, вследствие чего стержень приближается к соплу, т. е. действие, совпадающее с воздействием измерительного датчика и противоположное действие обратной связи. Настройкой дросселя можно изменять время изо-дрома от 6 с и до бесконечности. Изодромно – дифференциальный регулятор ПР-3.25 предназначен для создания непрерывного регулирующего воздействия на исполнительный механизм с целью поддержания заданной величины регулируемого параметра. Такие регуляторы применяют в тех контурах регулирования, где необходимо получить ПИД-закон регулирования. Регулятор смонтирован из трех элементов. Пропорционально-интегральная часть регулятора ПР-3.25 работает по такому же принципу, как и рассмотренный выше регулятор ПР-3.21. В регулятор введено дополнительное звено-дифференциатор. Таким образом, у этого регулятора имеются три органа настройки: время предварения (настройка в пределах от 3 с до 10 мин), диапазон дресселирования (предел пропорциональности), настраиваемый в пределах от 5 до 3000%, и время изодрома (интегрирования), настраиваемое в пределах от 3 с до 100 мин.
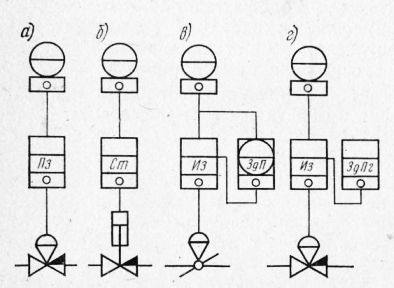
Рис. 1. Условные изображения пневматических регуляторов в функциональных схемах: Условные изображения элементов регулирования в функциональных схемах показаны на рис. 1. Похожие статьи: Навигация: Статьи по теме:
Главная → Справочник → Статьи → Блог → Форум |
|
|
|


|
Информационный сайт о строительных материалах и технологиях. Контакты: Никита Королёв - © 2008-2014 |
© Все права защищены.
Копирование материалов невозможно. |
|