|
|
Навигация:
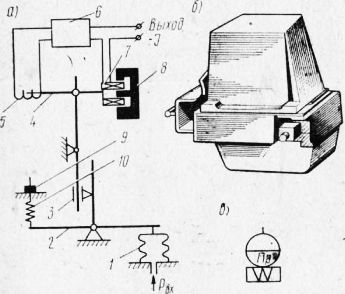
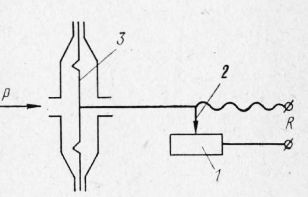
Измеряемые параметры, характеризующие технологический процесс, подразделены на две группы: электрические и неэлектрические. Если измерять и передавать на расстояние электрические параметры, как правило, незатруднительно, то для измерения неэлектрических параметров приходится преобразовывать их в другие виды (например, в электрические, пневматические или гидравлические), удобные для отсчета и передачи на расстояние. Для этой “цели применяют различные измерительные приборы, выполняющие функцию преобразователей. Измерительный преобразователь (первичный прибор) предназначен для дистанционной передачи сигнала измерительной информации на вторичный прибор. Преобразователи условно разделены по измеряемым параметрам: давлению, температуре, уровню и др. Кроме того, преобразователи можно разделить на электрические, пневматические и гидравлические. Электрические преобразователи в свою очередь разделяют на индукционные, дифференциально-трансформаторные, ферродинамические, токовые и емкостные. Применение дистанционных передач позволяет концентрировать приборы, контролирующие технологические параметры, на центральном щите. С этого щита и управляют технологическими установками. Сигналы от первичных преобразователей поступают на приемники этих сигналов — вторичные приборы. Первичные приборы (преобразователи) выпускают либо бесшкальными, только с устройством для дистанционной передачи, либо одновременно показывающими и самопишущими, т. е. со шкалами для ведения контроля технологического параметра на месте установки. Все преобразователи состоят, как правило, из воспринимающих элементов, которые соприкасаются с измеряемым параметром, преобразователя и усилителя. Для контроля и управления’ современными технологическими объектами требуется большое число приборов. Щит управления в таких условиях становится большим, и наблюдение за приборами усложняется. Применение управляющих вычислительных машин позволило коренным образом изменить принципы построения технологического контроля. Подготовка сигналов, поступающих к электронным вычислительным и управляющим машинам от первичных приборов, и построение схем централизованного контроля происходят с использованием приборов как с пневматическим, так и с электрическим выходным сигналом. В современных машинах централизованного контроля и управления требуются однотипные (нормированные) входные сигналы. Таким нормированным сигналом в СССР в большинстве случаев является сигнал постоянного тока. Кроме того, иногда необходимо связать две различные системы измерения, имеющие различные выходные сигналы. Например, часто требуется связать систему приборов с пневматическим выходным сигналом с системой, рассчитанной на работу с электрическими токовыми приборами, и наоборот. Ниже рассмотрены некоторые типы подобных преобразователей. Токовый преобразователь предназначен для преобразования усилия, развиваемого измерительным устройством в унифицированный токовый сигнал. Токовый сигнал может изменяться в пределах 0-=-5 мА или 0-f-20 мА. К токовому преобразователю можно подключать различные измерительные элементы: измеряющие давление, уровень, расход материала и т. п. Таким образом, измеряемый неэлектрический технологический параметр преобразователь превращает в выходной электрический сигнал — токовый. Этот сигнал передается по двум проводам на вторичный прибор или в управляющую машину. Расстояние между первичным прибором-преобразователем и вторичным может достигать 10 км. Основные узлы и элементы преобразователя следующие: измерительный элемент (например, гофрированный металлический стакан — сильфом, измеряющий давление р); под его воздействием деформируется и через систему рычагов перемещается флажок, находящийся в индикаторе рассогласования. Индикатор рассогласования преобразует перемещение флажка в сигнал переменного тока, поступающего на вход электронного усилителя. Выходной сигнал усилителя в виде постоянного тока поступает в катушку механизма обратной связи и одновременно в последовательно соединенную с ней линию дистанционной передачи к вторичному прибору. Взаимодействие магнита 8 с магнитным полем, создаваемым током, протекающим в катушке, создает усилие, которое через рычаг уравновешивает усилие от измерительного элемента. С помощью гайки и пружины корректируют начальное значение выходного сигнала. При помощи подвижной опоры меняют пределы измерения. Пневматический преобразователь позволяет путем сочетания с различными измерительными устройствами измерять практически также любые технологические параметры и преобразовывать их в стандартный пневматический выходной сигнал величиной q 2—1,0 кг/см2, служащий для передачи величины параметра на вторичный прибор.
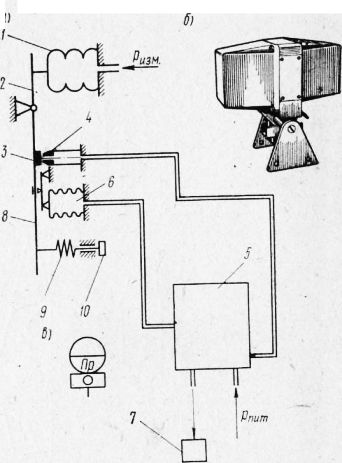
Рис. 1. Токовый преобразователь: Нулю измеряемого параметра в этих преобразователях соответствует давление 0,2 кг/см2, а максимальное значение параметра (100%) —давлению 1,0 кг/см2 (ОД МПа). Первичный прибор, оснащенный пневматическим преобразователем, соединяется со вторичным прибором трубкой с внутренним диаметром 6 мм. Максимальное расстояние между первичным и вторичным прибором составляет 300 м. Рассмотрим работу пневматического преобразователя. Измерительное устройство соединено с рычагом. Оно вызывает перемещение рычага и заслонки относительно сопла. К пневмоусилителю 5 подается сжатый воздух давлением 1,4 кг/см2. При увеличении измеряемого давления ризм заслонка закрывает сопло. Тогда давление в линии сопла и в пневмоусилителе 5 будет увеличиваться. Воздух поступит и в сильфон 6 обратной связи. Выходной сигнал рв преобразователя будет подаваться на вторичный прибор. Давление в сильфоне обратной связи будет увеличиваться до тех пор, пока его усилие через передвижную опору 8 не уравновесит усилие, приложенное к рычагу. В состоянии равновесия изменение выходного сигнала преобразователя пропорционально изменению входного усилия. При уменьшении усилия от измерительного элемента заслонка откроет сопло и давление в линии сопла снизится. Давление в камерах на выходе преобразователя и в сильфоне обратной связи уменьшается до тех пор, пока не наступит состояние равновесия. Начальное значение выходного сигнала устанавливают при помощи пружины и винта. Пределы измерения параметра настраивают передвижной опорой.
Рис. 2. Пневматический преобразователь:
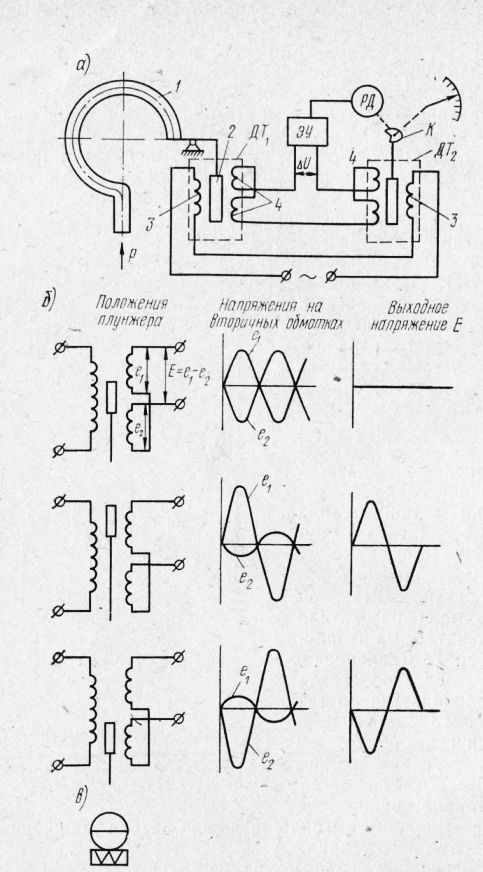
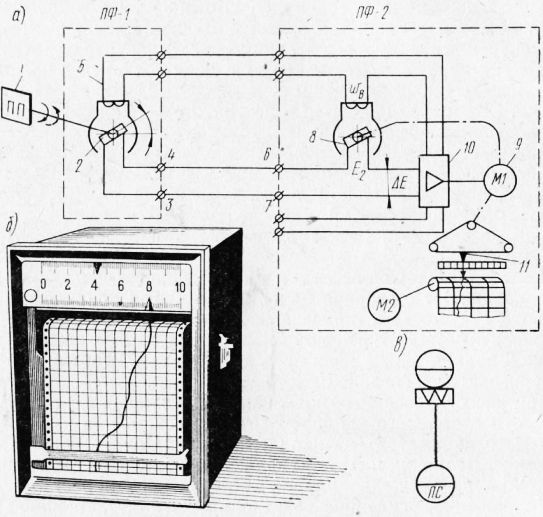
Рис. 3. Дифференциально-трансформаторный преобразователь дтп: Дифференциально-трансформаторный преобразователь. При необходимости измерения технологических параметров на дистанции применяют измерительные преобразователи, использующие дифференциально-трансформаторные преобразователи (ДТП). Передающий ДТП соединяют со вторичным прибором четырехпро-водной линией связи. Работа ДТП происходит следующим образом. Измерительный элемент соединяют со стальным плунжером, который может перемещаться внутри катушки. Катушка имеет одну-первичную обмотку и две вторичные. Вторичные обмотки включены, встречно, т. е. конец первой катушки соединен с концом второй, следовательно, наведенные в них э. д. с. сдвинуты по фазе на 180°. Эти э. д. с. наводятся в результате подачи переменного тока в первичную обмотку. При симметричном расположении стального плунжера внутри катушек относительно секций вторичных обмоток напряжение на входе усилителя ЭУ равно нулю. Перемещение плунжера приводит к тому, что э. д. с. обмотки, в которую входит плунжер, увеличивается, а э.д. с. обмотки, из которой выходит плунжер, уменьшается. Для дистанционной передачи ДТП встраивают в первичный прибор и соединяют с вторичным прибором (компенсирующим преобразователем) по схеме, приведенной на рис. 3, а. Из схемы видно, что первичные обмотки преобразователей соединены последовательно и подключены к цепи переменного тока. Вторичные обмотки преобразователей соединены встречно. При рассогласованных положениях плунжеров в катушках первичного и вторичного приборов (что возможно при изменении измеряемого параметра) на вход усилителя 1 будет подаваться напряжение. Величина и фаза напряжения зависят от величины и направления перемещения плунжера первичного прибора. Напряжение, усиленное электронным усилителем, приведет во еращение реверсивный двигатель, который переместит стрелку вторичного прибора, а с помощью профильного лекала К — плунжер компенсирующего преобразователя. Направление перемещения стрелки, плунжера и вращение двигателя будет зависеть от фазы входного напряжения. Плунжер вторичного прибора будет перемещаться до момента согласования положения с плунжером ДТП. Дифференциально-трансформаторные преобразователи входят в комплекты манометров, дифманометров и других измерительных приборов. Ферродинамический преобразователь. Преобразователи ферро-Динамические (ПФ) предназначены для дистанционных измерений технологических параметров. В зависимости от измерительного элемента ими можно измерять давление, расход, уровень и т. д. В качестве выходного сигнала преобразователи ферродинамические используют э.д. с. переменного тока. Эта э.д. с. может меняться как о фазе, так и по напряжению. Максимальное расстояние между 1ервичным прибором, снабженным ПФ, и вторичным — до 1 км. Работа преобразователя заключается в следующем. Перемещение измерительного элемента преобразуется в угол поворота рамки ПФ-1. Обмотка рамки соединена с клеммами 3—4. Обмотка катушки 5 питается током промышленной частоты — 50 Гц и создает магнитный поток, который наводит э. д. с. в обмотке рамки. Величина наведенной э.д. с. изменяется при повороте рамки от нуля до 2 В. Таким образом, измеряемый технологический параметр преобразуется с помощью ПФ-1 в сигнал переменного тока, который поступает на клеммы 6—7 вторичного прибора.
Рис. 4. Ферродинамическая система передачи показаний: Вторичный прибор измеряет э.д.с. от ПФ-1 компенсационным методом. Во вторичный прибор встроен ПФ-2. Рамка преобразователя ПФ-2 вторичного прибора связана с электродвигателем, поворачивающим ее на угол, при котором преобразователь ПФ-2 развивает э. д. с. Ег. Рамки первичного прибора и вторичного прибора соединены последовательно, чтобы развиваемые ими э. д. с. были направлены встречно. Поэтому на вход электронного усилителя подается разность э. д. с. обоих рамок. Если Д£ = 0, система находится в равновесии и двигатель не вращается. При изменении величины измеряемого параметра поворачивается рамка ПФ-1 и изменяется э. д. с. Ei. Равновесие системы нарушается и на вход электронного усилителя поступает э д. с. Напряжение с электронного усилителя поступит на электродвигатель, перемещающий стрелку и рамку преобразователя ПФ-2 вторичного прибора. Перемещение стрелки и рамки ПФ-2 происходит до момента равенства э.д. с Еt и Е2 и, следовательно, углов поворота рамок. Реостатный преобразователь преобразует линёиное или угловое перемещение в пропорциональное электрическое сопротивление. Такой преобразователь. представляет собой реостат, движок которого связан с мембраной или другим движущимся измерительным элементом. При измерении измеряемого параметра движок перемещается, вследствие чего изменяется сопротивление преобразователя. Реостатные преобразователи обычно изготовляют из тонкой проволоки, намотанной на каркас. В зависимости от профиля каркаса при перемещении движка сопротивление может изменяться по любому закону. К измерительным устройствам и приборам реостатные преобразователи переключают главным образом по схеме потенциометра. Специальные преобразователи. Преобразователь токовый для термопар ПТ-ТП предназначен для работы в комплекте со стандартными термопарами (ТХК, ТХА, ПП). Принцип действия преобразователя основан на преобразовании термо-э. д. с. термопары в унифицированный сигнал постоянного тока. Преобразователь ПТ-ТС предназначен для работы в комплекте с термометрами сопротивления. Изменение сопротивления термометра преобразуется в унифицированный сигнал постоянного тока на выходе преобразователя.
Рис. 5. Схема реостатного преобразователя
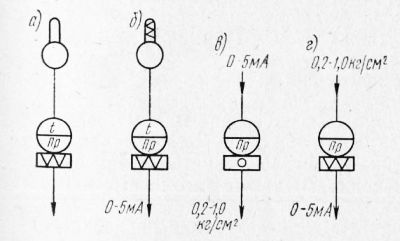
Рис. 6. Условные изображения различных специальных преобразователей в схемах: Сопротивление линии между преобразователями и вторичными приборами не должно превышать 2500 Ом. Электропневматический преобразователь типа ЭПП предназначен для преобразования унифицированного сигнала постоянного тока 0—5 мА в унифицированный пневматический сигнал 0,2—1 кг/см2. Этот сигнал можно использовать в пневматических системах контроля и регулирования. Электропневмопреобразователь ЭПП может работать с любыми вторичными пневматическими приборами, рассчитанными на пределы измерения давления 0,2 -1 кг/см2. Пневмоэлектрический преобразователь типа ПЭ предназначен для преобразования унифицированного пневматического сигнала 0,2—1 кг/см2 в унифицированный сигнал постоянного тока 0—5 мА. Сопротивление линии между преобразователем и вторичным прибором может достигать 2500 Ом. Похожие статьи: Навигация: Статьи по теме:
Главная → Справочник → Статьи → Блог → Форум |
|
|
|
|
Информационный сайт о строительных материалах и технологиях. Контакты: Никита Королёв - © 2008-2014 |
© Все права защищены.
Копирование материалов невозможно. |
|